Servo
Learn how to use the basics of the Servo Library and interact with a Servo.
Required Components
- Micro Servo
- 3 wires to connect the servo
Hooking up Components
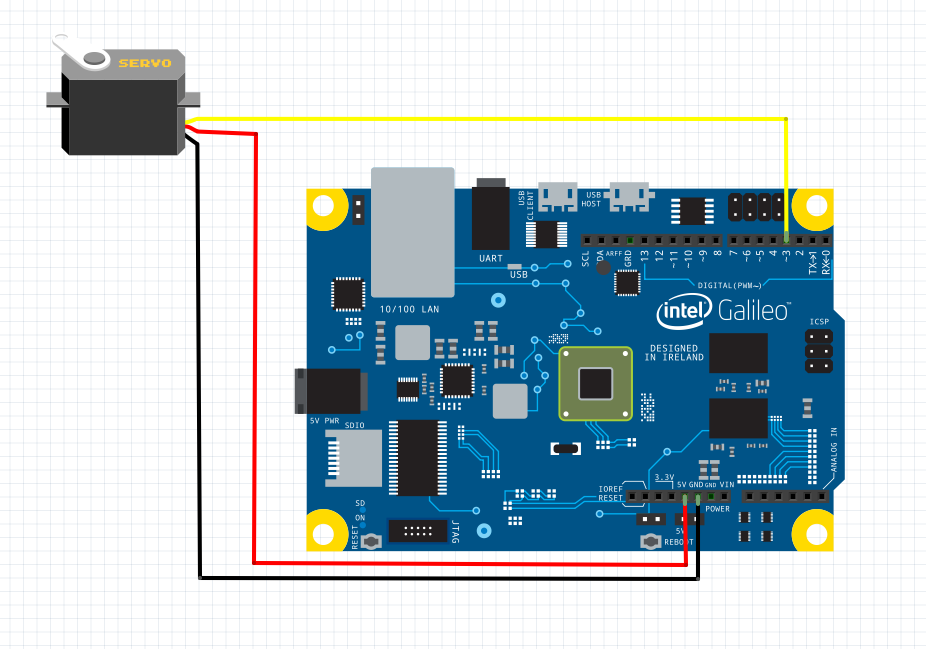
If you are using a basic servo that does not require external power, this should be your configuration:
Create a new project
- Create a new project from the template.
- Hook up the signal wire (orange if you are using the Micro Servo above) to pin 3 on your Galileo.
- Hook up the ground wire (brown if you are using the Micro Servo above) to the Ground pin on your Galileo.
- Hook up the voltage wire (red if you are using the Micro Servo above) to the 5V pin on your Galileo.
- Replace the existing code in main.cpp with the following code:
Code
Main.cpp
// Main.cpp : Defines the entry point for the console application.
//
#include "stdafx.h"
#include "arduino.h"
#include <Servo.h>
int _tmain(int argc, _TCHAR* argv[])
{
return RunArduinoSketch();
}
Servo myservo; // create servo object to control a servo
int delayAmount = 2000; // used for spacing out calls
int pin = 3; // the pin that the Servo is on
void setup()
{
myservo.attach(pin); // attaches the servo on pin to the servo object
}
void loop()
{
if (!myservo.attached())
{
Log("Servo is not attached\n");
Log("Servo is attaching\n");
myservo.attach(pin);
if (myservo.attached())
{
Log("Servo is attached\n");
}
}
else
{
Log("Servo is attached\n");
}
myservo.write(0); // tells the servo to go to angle 0
Log("ServoIndex: %d\n", myservo.read());
Log("ServoIndex in Microseconds: %d\n", myservo.readMicroseconds());
delay(delayAmount);
myservo.write(180); // tells the servo to go to angle 180
Log("ServoIndex: %d\n", myservo.read());
Log("ServoIndex in Microseconds: %d\n", myservo.readMicroseconds());
delay(delayAmount);
if (myservo.attached())
{
Log("Servo is attached\n");
Log("Servo is detaching\n");
myservo.detach();
if (!myservo.attached())
{
Log("Servo is detached\n");
}
}
else
{
Log("Servo is not attached\n");
}
}